电梯上常用的几种传动装置
传动原理,机器可大致分为原动机和工作机两类。蒸汽机、内燃机、水轮机、电动机等都是原动机。车床、刨床、电梯轿厢等都是工作机。
要使工作机工作,必须使原动机带动工作机一起运动,也就是说,把原动机的运动通过传动装置传递到工作机上去。于东的传递可以用不同的装置来完成。电梯上常用的几种传动装置如下:
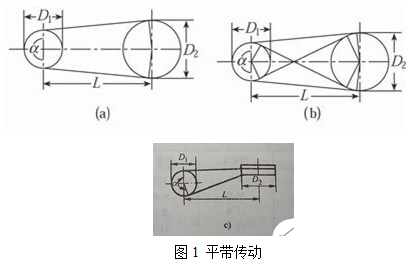
当两轴中心距离较远时,可采用平带传动。在平带传动中,若需要使两轮旋转方向相同,则能够使用开口带,如图1-a所示;若需要两轮旋转方向相反,能够使用交叉带,如图1-b所示;若需要两轮轴线既不相交又不平行,能够使用半交叉带,如图1-c所示。
在平带传动中,带的拉力大少与带轮的包角α有关。包角越小,拉力越小,反之就越大。一般包角不小于150度。
应用平带传动,结构相对比较简单,成本低,更换方便,但它所占空间较大,使用 安全保护装置麻烦。此外,由于在传动时容易打滑,所以得不到要求的速比。平带传动在电梯上应用时,为避免打滑,有得在带上做了齿,称为齿形带或楔形带,并在带轮上做了槽,例如,现在在电梯上应用的传动曳引机以及电梯的测速发电机带或井道内传感器带等。
当两轮的轴心线之间距离不大时,可采用V带传动。V带传动具有传动平衡,不易振动的特点,如果要增加传动力,只要增加带的根数就可以了。V带与带轮之间的摩擦力较大,不易打滑,它的包角一般不小于70度。电梯轿厢的门机传动装置,以及电梯的测速发电机传动装置有的就采用了V带传动。
这里先说一说电动机械的行驶速度与机械减速比的问题:行驶速度顾名思义就是机械
进行较高精度的速度控制,传统的检测及控制器件未必能让人满意。光电鼠标芯片因以其高精度、低现场环境要求、低价格等因素非常适用于位置检测场合。鉴于此,结合光电鼠标芯片
综合性能实验设备测控系统的开发。具体阐述了系统的结构组成及功能、工作原理和测控系统软件
的滞后误差 /
比分配及拆装 /
在制作遥控的电动模型和玩具“机器人”时,除了它的电子控制电路以外,较为关键的便是它的电动
的制作。我们大家都知道无论电动模型和玩具“机器人”,它的动力源都是低压直流电动机,由于电机的转速大都
的设计制作解析 /
,会因为安装、制造等原因,造成传递有误差,也就是我们所谓的传递误差。 传递误差定义 传递误差定义为旋转结
的传递误差 /
,实现机械运动的技术方法。其原理是将电能转化为机械能,通过运动控制器,输出给电机,再由电机驱动
(如齿轮、联轴器、皮带)将机械能转移和扩散到需要的位置或设备上,以实现生产或生活中
主轴胀套位置磨损 /
麒麟9000S到底谁代工的 麒麟9000s geekbench测试结果
【国产FPGA+OMAPL138开发板体验】(原创)4.FPGA的GPMC通信(ARM)EDMA
【先楫HPM5361EVK开发板试用体验】(原创)5.手把手实战AI机械臂